一、团队简介
团队主要围绕虚拟现实/增强现实/脑机接口人机交互、软体、绳驱/仿生/仿生机器人、运动建模、智能检测等开展研究。近三年,团队在《Soft Robotics》、《IEEE Transactions on Neural Systems and Rehabilitation Engineering》、《IEEE Transactions on Haptics》、《仪器仪表学报》等期刊发表SCI/EI论文50余篇,获授权发明专利30余项。主持国家自然科学基金面上项目、青年项目、江苏省重点研发项目、省自然科学基金、军工项目、企事业项目30余项。
二、团队领军和成员简介
| 团队领军:刘佳,教授,江苏省首席科技传播专家,江苏省仪器仪表学会副理事长,主要从事增强现实、力触觉人机交互等方面的研究。. |
| 团队骨干:杨扬,副教授,硕士生导师,主要从事软体机器人、仿生机器人、医疗机器人、人工肌肉、智能材料、增材制造(3D打印)、柔性传感器、折纸结构等方面的研究。 |
| 团队骨干:刘卿卿,副教授,硕士生导师,主要从事偏振成像与图像处理;光电检测、光学仪器设计等方面的研究。 |
| 团队骨干:陈大鹏,副教授,硕士生导师,主要从事力触觉再现、自然人机交互、人工智能、盲人数字化教育、虚拟/增强现实技术等方面的研究。 |
| 团队骨干:夏贵羽,副教授,硕士生导师,江苏省人工智能学会教育专委会委员。从事机器学习、计算机视觉领域、运动建模、图像生成、稀疏低秩理论相关研究,以第一作者发表IEEE汇刊及中科院一区论文11篇。 |
| 团队骨干:严飞,副教授,硕士生导师,主要从事图像传输、处理与显示技术、微弱信号提取与处理等方面的研究。 |
| 团队骨干:陈旭,副教授,硕士生导师,主要从事虚拟现实、触觉交互等方面的研究。 |
三、团队科技创新亮点
1、力触觉装置及康复装置
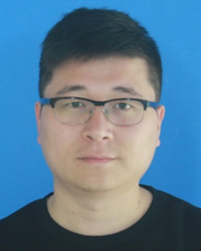
团队成员先后主持或参与研制了多套力触觉装置。图1为柔性触觉再现装置,可感知物体的刚度和柔软性,图2为手指可穿戴的多模式力触觉装置。图3显示了一种用于视障者感知文字和图像多种特征信息的指套式装置。该装置可为视障者与触摸屏的交互提供敲击、振动、温度、六自由度的力和动觉反馈等刺激。
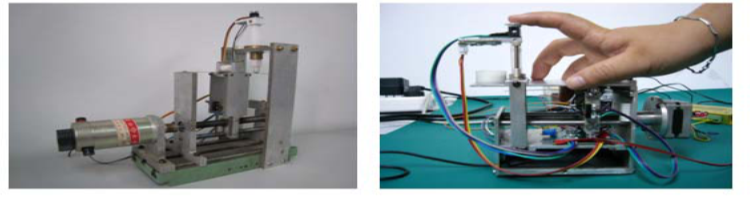
图1 柔性触觉感知再现装置(感知物体刚度和柔软性)
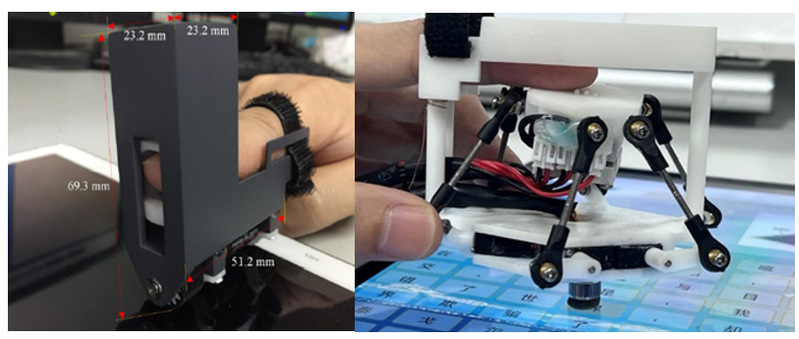
图2 手指可穿戴的力触觉装置和用于视障者感知文字及图像中虚拟物体多种特征信息的指套式装置
2、基于脑电的虚拟现实恐高症水平识别
该研究利用功能脑网络方法分析被试者在VR游戏《Richie’s Plank》中“高楼悬空踏板”上行走,暴露在恐高状态时的脑电信号,提取功能脑网络特征。统计结果表明基于卷积神经网络的功能脑网络特征提取及识别算法可行,基于大脑功能分区特征可用于客观判断VR恐高水平。
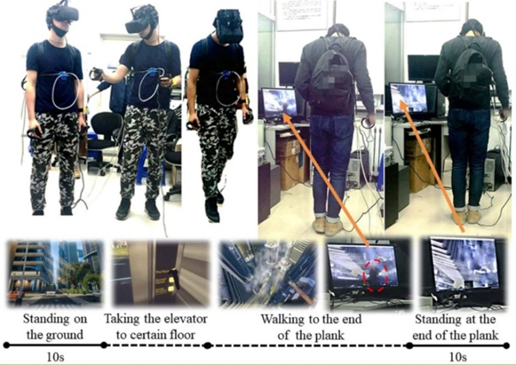
图3 虚拟现实环境中恐高程度评估实验流程
3、全驱动绳悬吊并联机器人
针对绳悬吊并联机器人超出其静态工作空间的动态轨迹规划问题,提出了三平动三索驱动空间绳悬吊并联机器人和六自由度六索驱动绳悬吊并联机器人的点对点运动、周期及其转移运动的动态轨迹规划方法,并在开发的绳悬吊并联机器人实验系统上对规划的动态轨迹进行了实验验证,实现了超出机器人静态工作空间的高速可控运动(图5)。本方法与当前的绳悬吊并联机器人的轨迹规划方法相比,大大拓展了此类机器人的工作空间,具备在运动模拟器和增材制造等产业的推广前景。
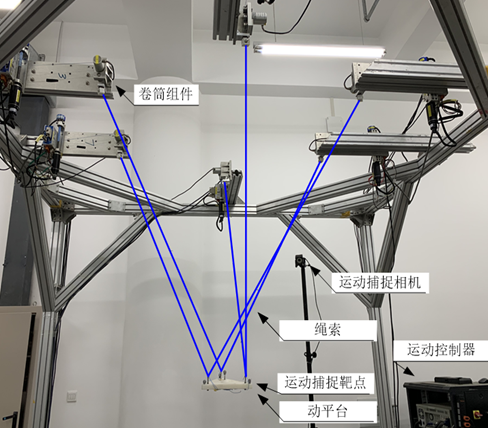
图4 全驱动绳悬吊并联机器人
4、软体机器人
如图6所示,将新型人工肌肉——捻曲纤维应用于软体机器人,实现了基于捻曲纤维人工肌肉的变刚度软体机器手指等软体机器人应用场景。设计了具有变刚度功能的软体弯曲执行器。将这种捻曲结构执行器应用于仿尺蠖爬行软体机器人和低成本软体机器人操作器,实现了用这种新型执行器驱动的6自由度机械臂及一个受鱼鳍鳍条结构启发的软体抓手。

图5 软体机器人
四、团队联系邮箱
meyang@nuist.edu.cn