
一、团队简介
智能感知与气象仪器控制团队主要致力于气象要素检测及装备、测试计量技术及仪器、无人系统感知与控制等方向的研究,现有成员18名,教授6人,副教授4。 近年来,团队共发表SCI/EI期刊40余篇,获授权发明专利30余项。主持国家自然科学基金面上项目、青年项目、军工项目、江苏省自然科学基金等项目。
二、团队领军和成员简介
| 团队领军:周旺平,南京信息工程大学自动化学院教授、副院长。2007年7月毕业于中国科学院研究生院获博士学位,主要从事气象仪器和机器人等自动化装备研发。中国自动化学会人工智能与智慧教育专委会委员、江苏省安全生产委员会信息化专家组成员。主持或作为主要成员完成国家自然科学基金、国家重大仪器产品研发专项子课题、国家安监总局前沿项目、省产学研前瞻项目等10余项;主持完成企业委托项目13项。发表学术论文22篇,获授权专利40余件(其中,与企业合作授权20余件,为企业新增产值2000万元以上)。主持的气象自动化装备获2022年度中国自动化学会科普奖(全国仅三项)。 |
| 团队骨干:赵兴强,副教授,主要从事能量收集技术:(压电、电磁)振动能量收集、风能收集、人体动能收集等。 |
| 团队骨干:郭鑫,副教授。主要从事MEMS传感器与执行器(特别是MEMS加速度计、陀螺仪、谐振器、流速计等)的敏感拓扑结构设计、新型加工工艺及封装技术以及模数混合测控系统等方面的技术研究。 |
| 团队骨干:丁宇,副教授,硕导。主要从事激光诱导击穿光谱仪器研制、机器学习在光谱数据分析中的应用、武器装备的测试与计量技术研究。 |
| 团队骨干:杨明鹏,讲师,硕导。主要从事微流控、MEMS、可穿戴传感器等相关领域科研工作。 |
| 团队骨干:郭颖,副教授,硕导。中国微米纳米技术学会理事。主要从事微弱信号检测、工业缺陷检测、嵌入式开发等研究。 |
三、团队科技创新亮点
1、高精度的气象要素检测
研制出具有极高精度的温度及相对湿度检测仪器,精度分别为0.02℃、0.5%RH;最高精度、高稳定性的气压计,全温度范围测量精度±0.1hPa,年稳定性0.1hPa,达到了目前现场观测用气压计的最高精度。形成了具有自主知识产权的自动气象站,已实现了气象观测场的长期观测。研制的气象传感器参数测量精度等指标远优于WMO规定要求,部分产品在2010年上海世博会展出。

图1 气象要素检测
2、无人机系统
自主研制的植保机采用高效无刷电机作为动力,机身振动小、漂移少、稳定性高,可实现低高度作业,空中悬停等功能。搭载了高精度定位系统,喷洒农药更加精准。喷洒技术采用喷雾喷洒方式至少可以节约50%的农药使用量和90%的用水量,很大程度的降低资源成本。无人机可以替代大量的人工,并且提高了工作效率,可以在作物出现病虫害时短时间内做出反映,有效遏制病虫害的蔓延。

图2 植保机
研制的自动巡检无人机成功应用于国家电网公司,实现了航迹自主规划、飞行自主控制、全程“零”人工干预、飞控系统与相机控制系统深度融合,这在国家电网公司系统尚属首次。目前传统人工寻塔最多4塔/日,大疆无人机方案8塔/日,本方案达到30塔/日,是传统人工效率的7倍以上。

图3 电力巡检无人机
3、便携式/可穿戴式微量样品的离子检测
采用微流控技术提取/分离微量(微升级别)样品,结合电学/电化学传感方法,开发土壤养分离子便携式检测仪、可穿戴汗液传感器等设备。其中,研制的土壤养分离子便携式检测仪,可快速(1分钟)、原位、同步检测土壤中氮、磷、钾等养分离子,检测限低于20μM/L,误差±5%以内,无需测前校准,稳定性远高于传统离子性选择电极法,仪器在2015年银川“中国-阿拉伯国家博览会”展出,受到好评。
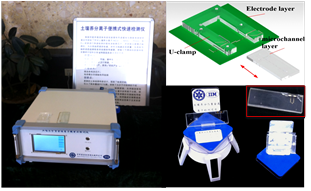
图4 便携式微量例子检测
4、便携式铝合金牌号分析仪
本产品是一款基于激光诱导击穿光谱技术的智能便携式铝合金牌号分析装置,针对不同国标牌号的铝合金牌号可以进行实时、原位的快速识别,通过此设计可以提高铝合金回收和再利用过程种的分类效率,以及多种铝合金牌号识别场景的识别效率。本产品符合各项国标铝合金测量标准,识别≥7种常见的国标铝合金,识别精度≥95%。

图5 便携式铝合金牌号分析仪
5、多通道延时脉冲发生器
本产品是一款基于FPGA的时序控制部件,该装置可对外部触发信号进行延时,也可自行发出多路时序脉冲,在激光打靶、核聚变、质谱仪器和光谱仪器等领域有广泛应用。
基于电容二次充电的工作原理,采用数字延时实现10ns以上的大范围延时,用斜坡电路实现 10ns 以下的模拟延时。本产品具有1个基准通道数(10ns延迟),8个从通道(延迟10ns可调),上升时间3ns,延时抖动160ps。

图6 多通道延时脉冲发生器
6、套索传动与精密运动控制
“套索”以绳索和柔性套管组合的方式进行力/位传动,具有结构柔顺、质轻体小、传递力大、传递路径任意的优势。采用套索传动不仅可有效降低整机尺寸和重量,还可实现驱动端和执行端的分离从而简化执行端结构。针对套索传动的强非线性特性,基于微元分析法建立了套索传递特性模型,其力矩模型精确度可达 92.3% ,位移模型精确度高达 94.2%,基于套索传动模型提出了多种套索传动系统的精密运动控制方法,可为各类柔性、细长、高精密机器人检测以及运动系统提供驱动与控制技术。
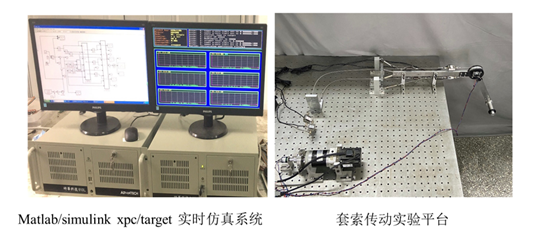
图7 套索传动研究实验平台
7、大气/溶液环境扫描隧道显微镜
可实现原子分辨率的桌面级扫描隧道显微镜。可进行固态导电样品、弱导电样品、生物样品等的表面成像。
参数:
分辨率:横向0.1nm,纵向0.01nm
扫描方式:恒高、恒流、混合、螺旋、回型
样品尺寸:最大支持45*45mm表面尺寸
高通量:一次最多支持5个样品进样
大范围:扫描范围可调节
图像显示:在线三维图像实时显示
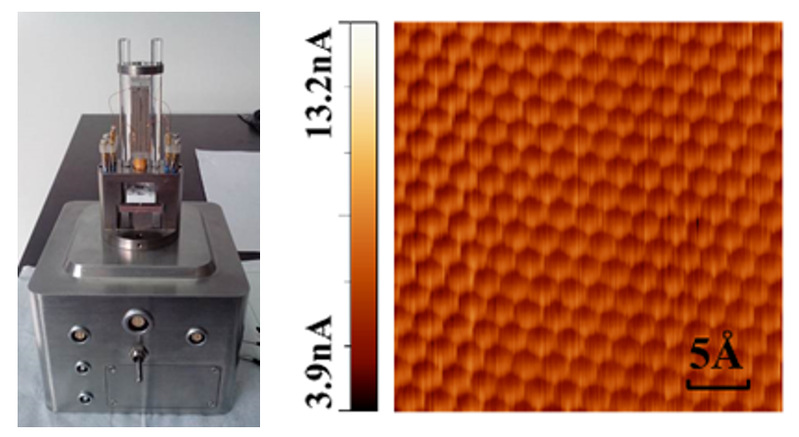
图8 扫描隧道显微镜
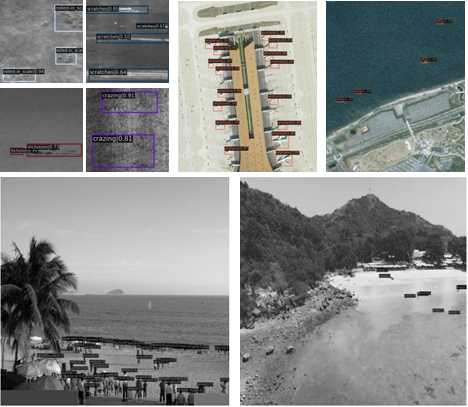
8、小目标检测在工业、遥感领域的应用
针对小目标数据集进行的系统研究,提出多种不同算法。目前对钢带表面缺陷、PCB缺陷、微小行人、遥感图像等小目标数据集的检测准确率都达到了国际先进水平。并针对终端树莓派和英伟达TX2进行部署应用,平均FPS为20左右。
项目 | 我们算法准确率 | Faster RCNN准确率 |
钢表面缺陷数据集 | 80.08 | 75.5 |
PCB缺陷数据集 | 96.4 | 92.4 |
TinyPerson微小行人数据集 | 56.78 | 47.35 |
HRRSD遥感数据集 | 94.46 | 81.5 |
四、团队联系邮箱





